2022年9月1日,在中国科学技术协会、上海市人民政府等单位共同主办的2022世界人工智能大会(WAIC 2022)上,永利集团前沿计算研究中心助理教授王鹤发表于 CVPR 2019 Oral 的工作 Normalized Object Coordinate Space for Category-Level 6D Object Pose and Size Estimation 获“2022世界人工智能大会青年优秀论文奖”(WAICYOP)。王鹤同时获首届 GAIAA 学术之星奖。祝贺!

GAIAA学术之星颁奖仪式现场
世界人工智能大会青年优秀论文奖由中国科学技术协会指导,世界人工智能大会组委会主办,面向全球40岁以下人工智能领域青年科学家征集近3年内在人工智能领域的优秀论文和重要成果。本年度共收到参评论文155篇,来自yl9193永利官网、清华大学、加州大学伯克利分校、卡内基梅隆大学、牛津大学等72所国内外知名高校、科研机构和企业。经专家初评,遴选出20篇论文进入终评,最终评选出“2022世界人工智能大会青年优秀论文奖”论文10篇、提名奖论文10篇。
王鹤博士的获奖论文题为 Normalized object coordinate space for category-level 6d object pose and size estimation( 基于归一化物体坐标空间的类别级六维物体位姿和尺寸估计),发表于计算机视觉领域国际顶级会议 CVPR 2019,被选为口头报告(Oral)。
物体六维位姿估计是计算机视觉、图形学和机器人学中的重要任务,在机器人抓取、闭环控制和增强现实(AR)中有广泛的应用。然而传统的位姿估计只能估计几个已知物体的位姿,大大阻碍了该技术在真实复杂环境中的应用。该工作突破性地将位姿估计推广到了可以在测试时直接估计未见过、无模型、但类别见过的物体的位姿,开创了类别级物体六维位姿估计这一领域,并贡献了第一个数据集,被视为位姿估计技术近年来的重大进展。
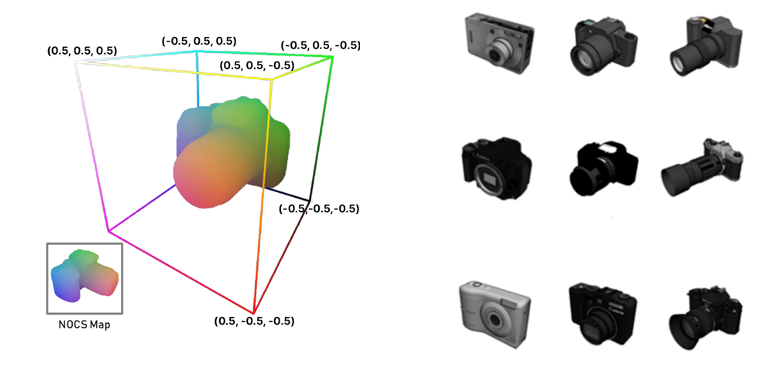
归一化物体坐标空间(Normalized Object Coordinate Space,即 NOCS)
该工作吸引了 Google brain 等国际主流机器人研究团队进行跟进,顶会顶刊总计已接收20余篇跟进工作,在中稿两年后成为 CVPR 2021的投稿子领域,并被包括图灵奖获得者 Geoffrey Hinton 在内的学者引用300余次 。在技术层面,该工作引入了类别级归一化物体坐标空间(Normalized Object Coordinate Space,简称 NOCS)这一位姿的中间表征,大大提升了类别内的位姿泛化效果,成为了该方向的奠基性技术。如今 NOCS 技术已被广泛应用在类别级可泛化的机器人物体操控、无人驾驶和位姿追踪中。
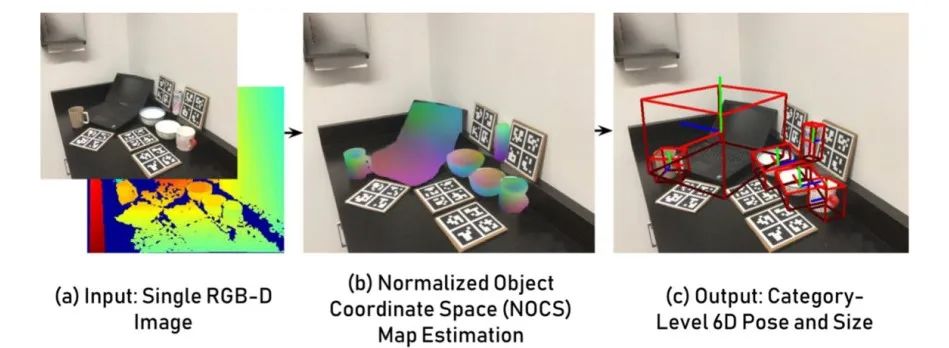
从单张RGBD图像中对未见过的物体进行类别级位姿估计

王 鹤
永利集团前沿计算研究中心
助理教授
王鹤博士现任永利集团前沿计算研究中心(CFCS)助理教授、博士生导师。他创立并领导了具身感知与交互实验室(EPIC Lab),实验室立足三维视觉感知与机器人学,重点关注具身机器人在三维复杂环境中的感知和交互问题,研究目标是以可扩增地方式发展高泛化性的机器人视觉和控制系统。
他已在计算机视觉、机器人学和人工智能的顶级会议和期刊(CVPR, ICCV, ECCV, RAL, NeurIPS)发表20余篇工作,其中8篇获得 CVPR/ICCV oral,1篇获得 Eurographics 2019最佳论文提名。EPIC 实验室获 ICLR 2021可泛化机器人物体操纵挑战赛 ManiSkill 无额外标注赛道冠军。他担任 CVPR 2022、2023领域主席和多个计算机视觉领域顶会的审稿人、程序委员。在加入yl9193永利官网之前,他于2021年在斯坦福大学获得博士学位,师从美国三院院士 Leonidas. J Guibas 教授,于2014年在清华大学获得学士学位。


